


蜘蛛手機器人實現精度與效率雙提升
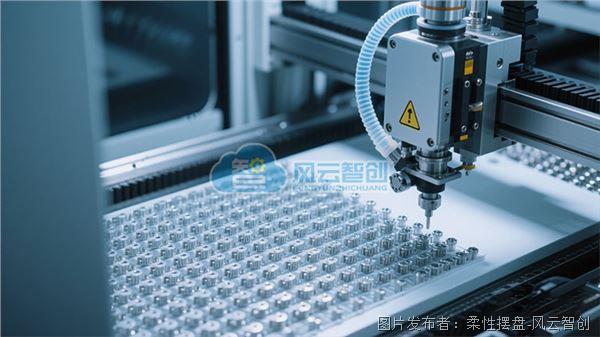
在電子制造行業持續追求微型化與精密化的今天,上料擺盤工序面臨著前所未有的挑戰。0402、0201 等微型元件的廣泛應用,對生產設備的精度、速度和適應性提出了更高要求。蜘蛛手機器人憑借其獨特的運動結構和智能控制系統,正在電子元件生產領域展現出顯著的應用價值。

電子元件生產面臨多重現實困境。首先,隨著元件尺寸持續縮小,傳統設備在抓取微型貼片元件時面臨精度不足的問題,視覺定位、精準抓取和穩定放置都變得極具挑戰性。其次,在高速生產環境下,常規機器人難以同時兼顧速度與精度,生產效率的提升往往以犧牲質量為代價。
此外,多品種、小批量的生產模式要求設備具備快速換產能力,而傳統專用設備轉換時間長、調整復雜,無法滿足現代電子制造對柔性的需求。最后,人工操作帶來的質量波動以及傳統自動化設備對微小缺陷的識別局限,使得產品質量管控面臨嚴峻挑戰。

蜘蛛手機器人通過多項技術創新解決了這些難題。其采用仿生學設計,通過多關節協同運動實現精準定位,獨特的結構設計使其在抓取微小元件時展現出極高的穩定性,有效解決了傳統設備在高速運動下的振動問題。配備的高分辨率視覺系統能夠實時識別元件位置和姿態,并通過先進的圖像處理算法自動補償定位誤差,確保抓取精度達到微米級。基于自適應算法的控制系統能夠根據元件特性自動調整抓取參數,這種智能化的控制方式使設備能夠快速適應不同規格的產品生產需求。
模塊化設計的末端執行器可根據不同元件的特性快速更換,大大提升了設備的適應性和使用效率。在實際應用中,蜘蛛手機器人取得了顯著成效。生產效率提升了 40% 以上,高速穩定的運行特性確保了生產節拍的持續穩定。通過精準的抓取和放置控制,產品不良率降低了 60%,不僅減少了返工成本,還提升了產品的市場競爭力。設備的快速換產能力將產品轉換時間縮短了 70%,顯著提高了設備利用率,柔性化生產模式減少了專用設備的投入,優化了整體投資效益。同一臺蜘蛛手機器人可處理多種不同規格的元件,極大提升了生產線的適應性,為企業應對市場變化提供了有力支持。

在電子制造行業轉型升級的關鍵時期,蜘蛛手機器人以其卓越的技術性能和出色的應用表現,正在成為推動行業發展的重要力量。其獨特的結構設計和智能控制系統,為電子元件生產提供了全新的解決方案。隨著技術的持續進步和應用場景的不斷拓展,這種智能設備將在電子制造領域發揮更加重要的作用。




 投訴建議
投訴建議
提交

柔性供料機在鉭電容生產中的應用
磁芯電感無損擺盤

微小零件上料與裝配方案

柔性編帶機如何實現快速換產與高效兼容

芯片柔性擺盤機的集成實踐與價值評估