


西門子S7-1200與EtherCAT伺服驅動器通訊配置易錯點解析
西門子S7-1200PLC通過EtherCAT轉Profinet主站網關對接EtherCAT伺服驅動器時,通訊故障主要集中于物理接線不規范與伺服參數配置疏漏,其中網關EtherCAT主站端與伺服驅動器的接線細節、伺服參數設置是核心把控點,以下結合實操規范,重點說明易忽視細節與常見問題。

EtherCAT總線為高速差分串行總線,接線規范性直接決定通訊穩定性與控制精度,核心易忽視細節如下:一,是端口方向不可接反,網關EtherCAT主站的OUT端口需與伺服驅動器的IN端口對應連接,下一臺伺服的IN端口接前一臺的OUT端口,嚴禁IN/OUT反接,否則總線無法建立連接;二,是拓撲結構嚴格遵循線性,需采用“EtherCAT轉Profinet網關→伺服→伺服→…伺服”的串聯方式,禁止星形、樹形接線,不可使用交換機分叉連接,避免信號反射導致通訊丟包;三,是終端電阻配置,總線兩端必須接入120Ω終端電阻,網關端與最末端伺服驅動器均需啟用,未配置或配置錯誤會引發通訊抖動、伺服響應滯后。

此外,屏蔽層接地與電纜選型易被忽視:需采用EtherCAT專用雙絞屏蔽電纜,嚴禁用普通網線替代,電纜需遠離伺服動力線(間距≥30cm),避免電磁干擾;屏蔽層采用“單端接地”,僅在網關側接入接地端子排,伺服端屏蔽層懸空絕緣,防止地環流干擾伺服控制信號。端子壓接需選用匹配線徑的冷壓端子,確保線芯無松動、虛接,避免伺服運行振動導致接線脫落。

伺服驅動器設置直接影響通訊成敗與控制精度,重點關注以下易忽視要點:一,是伺服需切換至EtherCAT從站模式,部分伺服默認是本地控制模式,需通過面板或軟件啟用EtherCAT從站功能,未啟用則EtherCAT轉Profinet網關無法掃描到設備;二,是節點地址唯一,伺服節點地址設為1~255之間的唯一值,與網關配置的從站地址嚴格一致,避免地址重復導致總線沖突;三,是通訊周期與時鐘同步,伺服通訊周期需與網關、PLC保持一致(建議50ms以內),啟用分布式時鐘同步,確保指令下發與狀態反饋同步,避免伺服定位偏差。

同時,需正確配置伺服PDO映射,將伺服位置、速度、扭矩等狀態信號映射至網關輸入區,將PLC下發的控制指令(啟停、調速、定位)映射至EtherCAT轉Profinet網關輸出區,映射錯位會導致控制失效;參數設置完成后需保存并重啟伺服,未保存則斷電后參數恢復默認,通訊中斷。
常見故障排查:網關掃不到伺服,優先檢查端口接線、終端電阻、從站模式;通訊連上但伺服無響應,核對節點地址、PDO映射、通訊周期;伺服定位偏差大,檢查時鐘同步、電纜干擾、端子接觸。規范接線與精準配置,可確保伺服驅動器穩定運行,實現精準定位與調速控制。




 投訴建議
投訴建議
提交
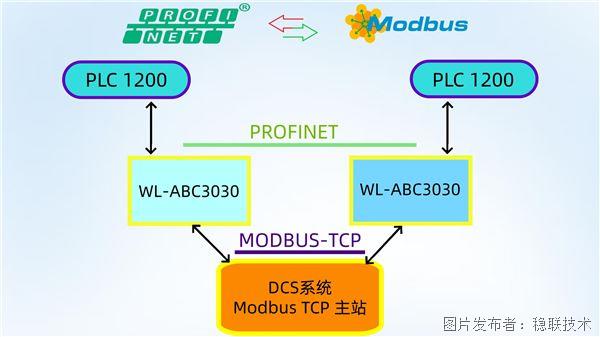
Profinet-ModbusTCP轉換技術的實戰應用
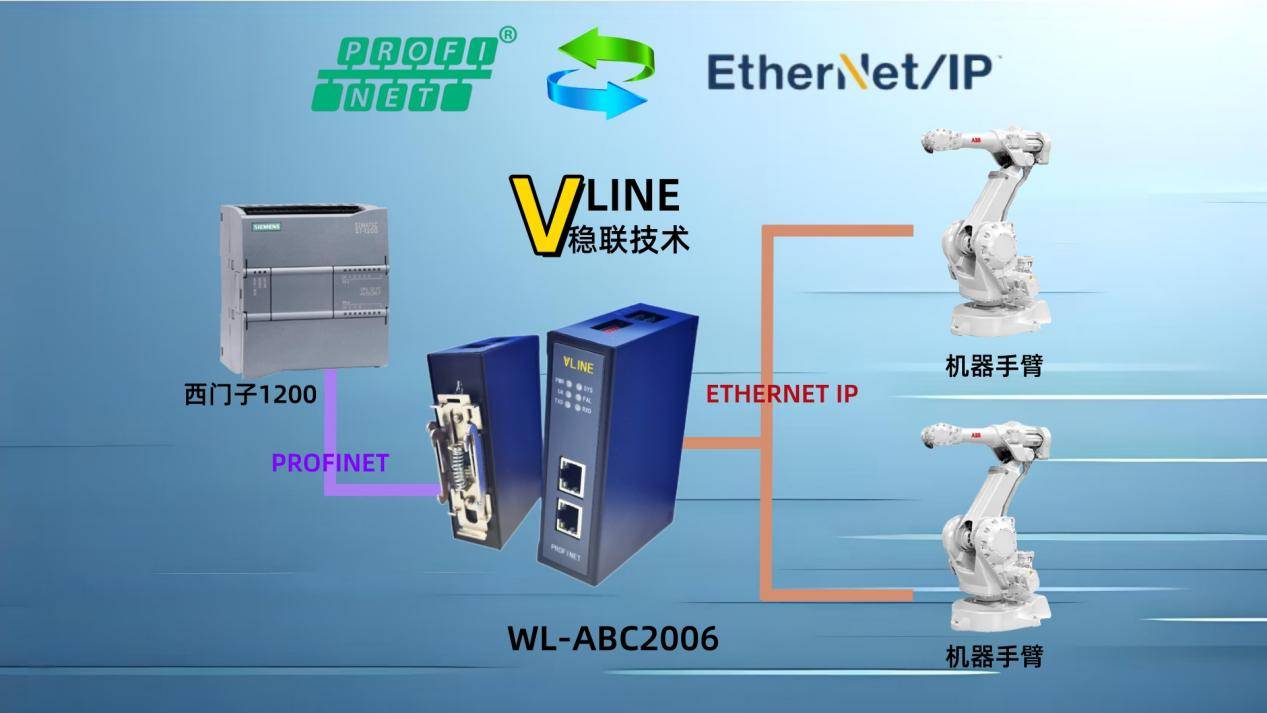
極速組態!Profinet轉Ethernet網關讓ABB機器人主站秒連工業網絡(上集)

混用之王profinet轉EtherCAT網關,視流/檢測與自動化線的穩定要素
profinet嵌入式開發板
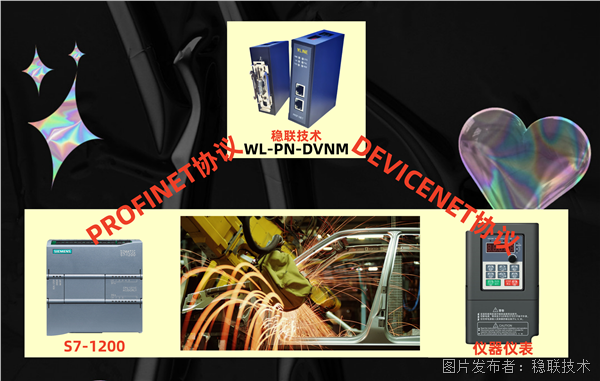
伺服Profinet轉DeviceNet