


案例速遞|手機攝像頭模組底殼檢測
檢測背景:
在手機攝像頭模組的精密制造流程中,模組底殼是鏡頭、CMOS傳感器、VCM馬達的核心承載與定位基準,其表面質(zhì)量直接決定模組的裝配精度、光學性能與長期使用可靠性。
檢測需求:
檢測對象:手機攝像頭模組底殼
檢測類型:表面劃痕、凹點、臟污
檢測精度:0.03mm/pixel
檢測方案:
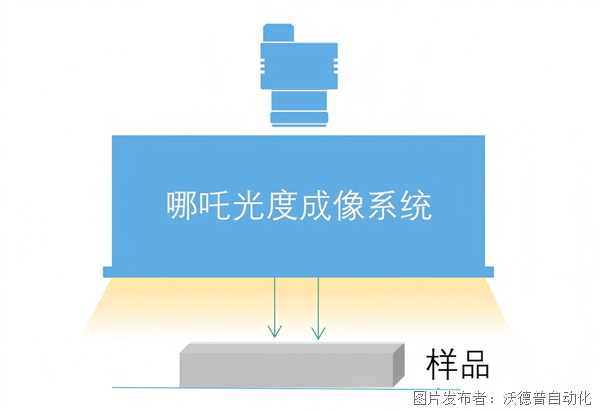
常規(guī)2D視覺檢測:采用單一方向照明,僅捕捉表面反射光強,微小高度差對應的灰度變化極弱,且易受工件紋理干擾,缺陷特征被淹沒。
成像.png")
(常規(guī)成像)
.png")
(光度成像系統(tǒng)-相對高度圖)
面陣光度成像系統(tǒng):采用固定面陣相機的同一視角下,通過4組不同方向的光源分時照明,采集同一檢測面的多幅灰度圖像。




(四張原圖)
再通過算法獲取表面的2.5D特征及多種面型特征,從而精準捕捉常規(guī)2D視覺無法識別的微觀缺陷。

(彩色融合圖)

(法向量圖)

(反射率圖)

(灰度融合圖)

(曲率圖)

(相對高度圖)

(最大值融合圖)
成像效果:
成像劃傷.png")
常規(guī)成像(劃傷)
.png")
相對高度圖(劃傷)
成像劃傷2.png")
常規(guī)成像(劃傷)
.png")
相對高度圖(劃傷)
劃痕的高度差被精準放大,缺陷輪廓清晰銳利,對比度大幅提升。
成像(凹坑).png")
常規(guī)成像(凹坑)
.png")
相對高度圖(凹坑)
成像(凸點).png")
常規(guī)成像(凸點)
.png")
相對高度圖(凸點)
凹坑、凸點的三維結(jié)構(gòu)被還原,缺陷位置、缺陷特征一目了然,徹底區(qū)分真實缺陷。
產(chǎn)品介紹:

光度圓頂光源
內(nèi)置四個獨立照明區(qū)域,可通過邏輯控制器實現(xiàn)分區(qū)依次點亮獲取圖像。再利用光度立體技術,通過陰影恢復表面的相對高度特征,獲取表面的2.5D特征以及多種面型特征。解決非反光產(chǎn)品表面的2.5D及棱邊缺陷。
應用案例:





 投訴建議
投訴建議
提交

突破鋰電檢測瓶頸!電解液漏液視覺成像技術
分體式多分區(qū)光源 VS 多分區(qū)光控光源

案例速遞|汽車車漆識別檢測
案例速遞|汽車輪胎字符識別檢測
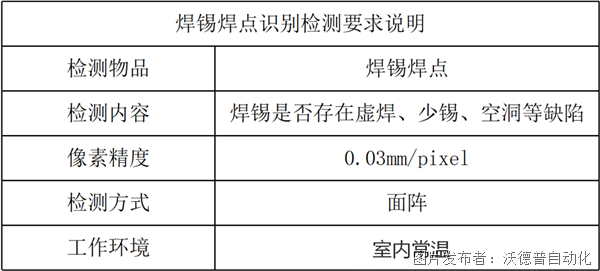
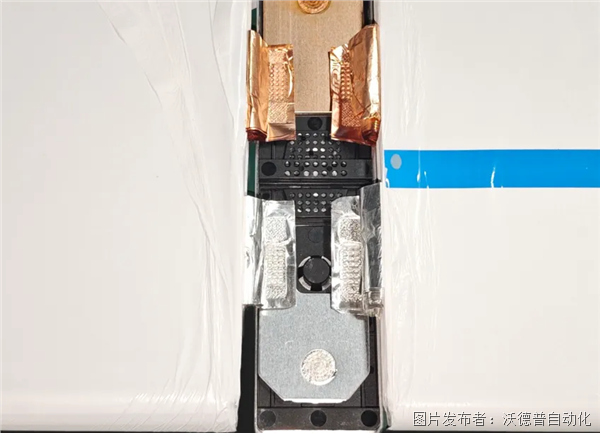
案例速遞|焊錫識別檢測